GOAL
To develop of a compact robot with improved power, run time, payload capacity, durability, and terrain navigation, while maintaining a small physical volume and comparable footprint and weight.
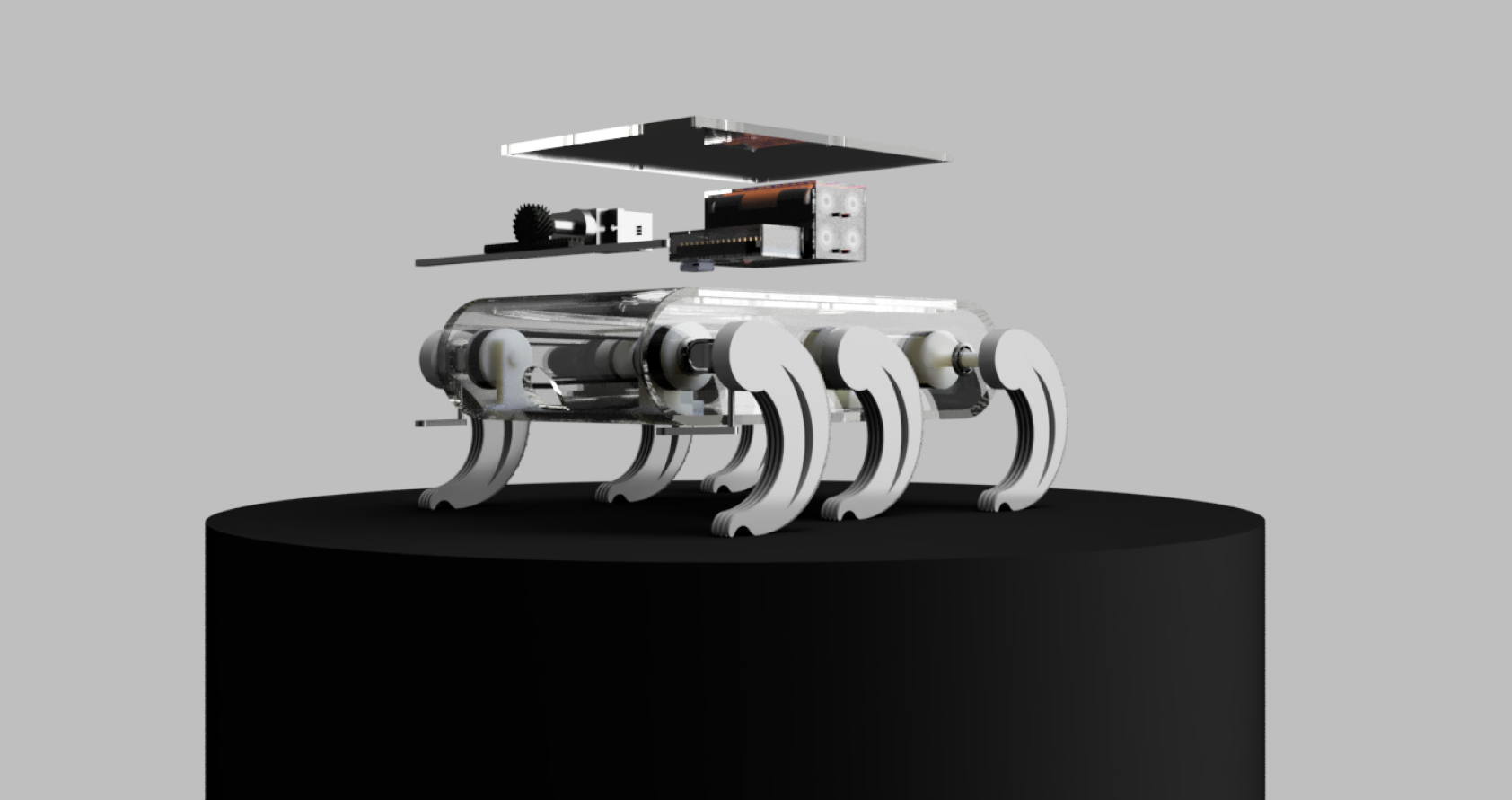
DESIGN
My rHex design comprises a hexapod with an individual rotary actuator for each leg, ensuring flexibility in movement. The robot weighs 294 grams and was produced at a cost of £91.41.